|
1、深度可分离卷积
Depthwise Separable Convolution
(一)结构
实质上是将标准卷积分成了两步:depthwise卷积和pointwise卷积。
标准卷积:

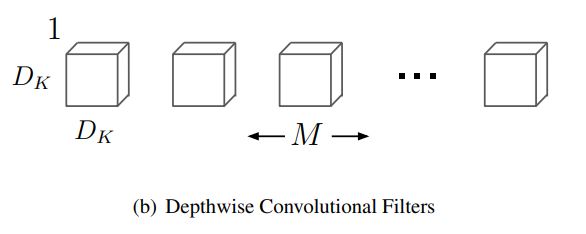
depthwise卷积:
pointwise卷积:

2、代码实现
[32, 3, 224, 224] ——> [32, 64, 112, 112]
1 import torch
2 import torch.nn as nn
3 import torch.nn.functional as F
4
5 class Block(nn.Module):
6 "Depthwise conv + Pointwise conv"
7 def __init__(self, in_channels, out_channels, stride=1):
8 super(Block, self).__init__()
9 self.conv1 = nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=2, padding=1, groups=in_channels, bias=False)
10 self.bn1 = nn.BatchNorm2d(in_channels)
11 self.conv2 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False)
12 self.bn2 = nn.BatchNorm2d(out_channels)
13
14 def forward(self, x):
15 x = self.conv1(x)
16 x = self.bn1(x)
17 x = F.relu(x)
18 x = self.conv2(x)
19 x = self.bn2(x)
20 x = F.relu(x)
21 return x
22
23 input = torch.randn(32, 3, 224, 224)
24 block = Block(3, 64)
25 out = block(input)
26 print(out.size())
|